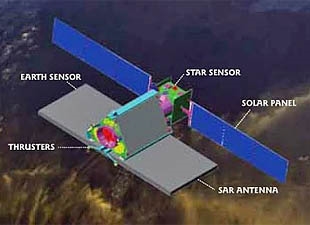
Crédito da imagem: ISRO
Um foguete indiano do PSLV decolou hoje do Centro Espacial Satish Dhawan, transportando o satélite de sensoriamento remoto IRS-P6 para uma órbita polar de 821 km de altura. O IRS-P6 é o satélite de sensoriamento remoto mais avançado construído pela Organização Indiana de Pesquisa Espacial (ISRO); monitorará principalmente os recursos naturais, como água, agricultura e coletará dados de gerenciamento da terra.
Em seu oitavo vôo realizado a partir do Satish Dhawan Space Center (SDSC), SHAR, Sriharikota, hoje (17 de outubro de 2003), o veículo de lançamento de satélites polares do ISRO, PSLV-C5, lançou com sucesso o satélite de sensoriamento remoto indiano RESOURCESAT-1 (IRS -P6) em uma órbita síncrona solar (SSO) polar de 821 km de altura. O RESOURCESAT-1 de 1.360 kg é o satélite de sensoriamento remoto mais avançado e mais pesado lançado pela ISRO até agora. O PSLV constitui um componente importante do sistema de ponta a ponta criado pelo ISRO para o planejamento e gerenciamento de recursos naturais.
O PSLV-C5 decolou de SDSC, SHAR, Sriharikota às 10:22 da manhã com a ignição do primeiro estágio do núcleo e quatro motores de amarração. Os dois motores restantes do primeiro estágio foram acionados 25 segundos após a decolagem. Depois de passar pelos eventos de vôo planejados, incluindo a separação dos motores de amarração iluminados no solo, a separação dos motores de amarração iluminados a ar e o primeiro estágio, a ignição do segundo estágio, a separação da carenagem após a liberação do veículo. atmosfera densa, separação do segundo estágio, ignição do terceiro estágio, separação do terceiro estágio, ignição do quarto estágio e corte do quarto estágio, o RESOUCESAT-1 foi injetado sistematicamente na órbita 1080 segundos após a decolagem.
O RESOURCESAT-1 foi separado após a reorientação adequada da combinação do quarto estágio do compartimento do equipamento para evitar qualquer colisão com o satélite. O RESOURCESAT-1 foi colocado na órbita síncrona polar do Sol (SSO) a uma altitude de 821 km, com uma inclinação de 98,76 graus em relação ao equador.
Sobre o PSLV
Pode-se notar que o PSLV foi projetado e desenvolvido pela ISRO para colocar satélites de sensoriamento indiano da classe de 1.000 kg na órbita polar síncrona do Sol (SSO). Desde seu primeiro vôo bem-sucedido em outubro de 1994, a capacidade do PSLV foi aprimorada de 850 kg para os 1.400 kg atuais em órbita síncrona solar de 820 km. O PSLV também demonstrou capacidade múltipla de lançamento de satélites. Até agora, lançou sete satélites indianos e quatro pequenos satélites para clientes internacionais.
A melhoria na capacidade de carga útil do PSLV em vôos sucessivos foi alcançada através de vários meios - aumento na carga do propulsor do motor propulsor sólido de primeiro estágio e motores propulsores líquidos de segundo e quarto estágio, melhoria no desempenho do motor de terceiro estágio otimizando caixa do motor e carga aprimorada do propulsor e empregando um adaptador de carga útil composta de carbono. A sequência de acionamento dos motores de amarração também foi alterada de duas iluminadas pelo chão e quatro iluminadas pelo ar para as atuais quatro sequências iluminadas pelo solo e duas iluminadas pelo ar.
No PSLV-C5, o adaptador metálico do terceiro estágio foi substituído pelo adaptador construído com compósitos de carbono. Além disso, o segundo estágio do propulsor líquido foi operado a uma pressão de câmara mais alta para melhor desempenho.
Na sua configuração atual, o PSLV de 44,4 metros de altura e 294 toneladas possui quatro estágios, usando sistemas de propulsão sólido e líquido alternadamente. O primeiro estágio é um dos maiores impulsionadores de propulsores sólidos do mundo e transporta 138 toneladas de propulsor de poli butadieno terminado com hidroxila (HTPB). Tem um diâmetro de 2,8 m. A caixa do motor é feita de aço maraging. O impulsionador desenvolve um impulso máximo de cerca de 4.762 kN. Seis motores de amarração, quatro dos quais são inflamados no chão, aumentam o impulso do primeiro estágio. Cada um desses motores de amarração do propulsor sólido transporta nove toneladas de propulsor sólido e produz empuxo de 645 kN.
O segundo estágio emprega o motor Vikas construído de forma indigena e transporta 41,5 toneladas de propulsor líquido - UH25 como combustível e tetróxido de nitrogênio (N2O4) como oxidante. Ele gera um empuxo máximo de cerca de 800 kN.
O terceiro estágio utiliza 7,6 toneladas de propulsor sólido à base de HTPB e produz um empuxo máximo de 246 kN. Sua caixa do motor é feita de fibra de poliamida. O quarto e o estágio terminal do PSLV têm uma configuração de motor duplo usando propulsor líquido. Com uma carga de propulsor de 2,5 toneladas (mono-metil-hidrazina e óxidos mistos de nitrogênio), cada um desses motores gera um empuxo máximo de 7,3 kN.
A carenagem de carga útil bulbosa metálica de 3,2 m de diâmetro do PSLV é de construção isogrelha e protege a espaçonave durante o regime atmosférico do voo. O PSLV emprega um grande número de sistemas auxiliares de estágio para separação de estágios, separação de carenagem de carga útil e jetting, etc.
O sistema de controle do PSLV inclui: a) Primeira etapa; Controle vetorial de impulso de injeção secundária (SITVC) para inclinação e guinada, propulsores de controle de reação para rolo b) Segunda etapa; Cardan do motor para inclinação e guinada e motor de controle de reação a gás quente para controle de rotação c) Terceiro estágio; bocal flexível para inclinação e guinada e PS-4 RCS para controle de rotação ed) Quarta etapa; Cardan do motor para pitch, yaw and roll e RCS on-off para controle durante a fase costeira.
O sistema de navegação inercial no compartimento de equipamentos, localizado no topo do quarto estágio, guia o veículo desde a decolagem até a injeção da espaçonave em órbita. O veículo é fornecido com instrumentação para monitorar o desempenho do veículo durante o voo. A telemetria PCM de banda S e os transponders de banda C atendem a esse requisito. O sistema de rastreamento fornece informações em tempo real para segurança de vôo e para determinação preliminar da órbita quando o satélite é injetado em órbita.
O Centro Espacial Vikram Sarabhai (VSSC), Thiruvananthapuram, projetou e desenvolveu o PSLV. A Unidade de Sistemas Inerciais ISRO (IISU) em Thiruvananthapuram desenvolveu os sistemas inerciais para o veículo. O Centro de Sistemas de Propulsão Líquida, também em Thiruvananthapuram, desenvolveu os estágios de propulsão líquida para os segundo e quarto estágios do PSLV, bem como sistemas de controle de reação. O Centro Espacial Satish Dhawan (SDSC), SHAR processou os motores sólidos e realizou operações de lançamento. O ISTRAC forneceu suporte de telemetria, rastreamento e comando.
Com sete lançamentos bem sucedidos, o PSLV provou ser um veículo confiável para o lançamento de satélites de sensoriamento remoto na Índia. Além disso, foi utilizado para o lançamento de um satélite geo-síncrono, o KALPANA-1. A ISRO propôs usar o PSLV para a primeira missão não tripulada da Índia na lua, Chandrayaan-1.
O RESOURCESAT-1 transporta três câmeras da seguinte maneira:
* Um auto-scanner de imagem linear de alta resolução (LISS-4) operando em três bandas espectrais na região visível e próxima do infravermelho (VNIR) com resolução espacial de 5,8 metros e orientável até + 26 graus na pista para obter imagens estereoscópicas e alcançar cinco dias revisitar a capacidade
* LISS-3 de média resolução operando em três bandas espectrais no VNIR e uma na banda de infravermelho de ondas curtas (SWIR) com resolução espacial de 23,5 metros
* Um sensor avançado de campo amplo (AWiFS) operando em três bandas espectrais no VNIR e uma banda no SWIR com resolução espacial de 56 metros.
O RESOURCESAT-1 também carrega um gravador de estado sólido com capacidade de 120 Giga Bits para armazenar as imagens captadas por suas câmeras que podem ser lidas posteriormente nas estações terrestres.
Logo após sua injeção em órbita, os painéis solares a bordo do RESOURCESAT-1 foram implantados automaticamente para gerar a energia elétrica necessária para o satélite. Outras operações, como estabilização de três eixos, estão sendo realizadas. A integridade do satélite está sendo monitorada continuamente a partir do Centro de Controle de Naves Espaciais em Bangalore com a ajuda da rede ISTRAC de estações em Bangalore, Lucknow, Maurício, Bearslake na Rússia e Biak na Indonésia. Outras operações no satélite, como aparar órbitas, verificar os vários subsistemas e, finalmente, ligar as câmeras serão realizadas nos próximos dias.
Com o ISRO Satellite Center (ISAC), Bangalore, como centro principal, o RESOURCESAT-1 foi realizado com contribuições importantes do Space Applications Center (SAC), Ahmedabad, do Liquid Propulsion Systems Center (LPSC) em Bangalore e da ISRO Inertial Systems Unit (IISU ), Thiruvananthapuram. O ISTRAC é responsável pela operação inicial e em órbita do RESOURCESAT-1. A estação de recepção de dados da Agência Nacional de Sensoriamento Remoto (NRSA) em Shadnagar, perto de Hyderabad, recebe os dados do RESOURCESAT-1.
Depois de comissionado, o RESOURCESAT-1 continuará não apenas os serviços do IRS-1C e do IRS-1D, mas também aprimorará os serviços de sensoriamento remoto, fornecendo imagens com melhor resolução espacial e bandas espectrais adicionais.
Fonte original: Comunicado de imprensa do ISRO